현재 블로그 이전 작업 중입니다. 빠른 시일 내에 새 블로그로 글을 이전하도록 하겠습니다.
2025년 1월 6일 수정: 글을 급하게 작성하다 보니 잘못된 부분을 몇 군데 발견했습니다. 꼼꼼히 검토하지 못한 점에 대해 사과드립니다.
셰이더와 3D 렌더링을 배우면서 그래도 살만해졌습니다. 사실 셰이더 없이 개발하면서는 서피스와 블렌드 모드만으로 할 수 있는 게 많이 없어서 셰이더 언제 배우냐를 연발했는데 버텍스와 프래그먼트(지오메트리는 아직도 모릅니다 🥲) 셰이더를 쓸 수 있게 되면서 그나마 제가 원하는 그래픽을 만들 수 있게 되었네요.
Honeyhouse 회고의 양식을 빌려 첫 문단을 작성했는데, Honeyhouse를 개발하고 난 뒤 2학기에 컴퓨터그래픽스를 수강하면서 OpenGL과 3D 렌더링을 배울 수 있게 되었습니다. 그 뒤로 GameMaker로 처음 개발한 3D 게임이 프로토 게임잼에 출품한 데굴푸쉬고, 이번에 공개한 Project::shear는 두 번째입니다. Honeyhouse 회고는 날짜별로 했던 작업을 정리했는데, 이번 회고는 기술적인 난관이 많았던 만큼 구현에 필요했던 세부사항 위주로 정리해 보려고 합니다. 되도록이면 엔딩까지 보고 나서 읽어주셨으면 좋겠습니다.
(많이 찍어놔서 다행이네요! 그럴 시간에 깃 커밋이나 해)
참고로 이번에는 깃 커밋을 했습니다.
시점 변환 시스템
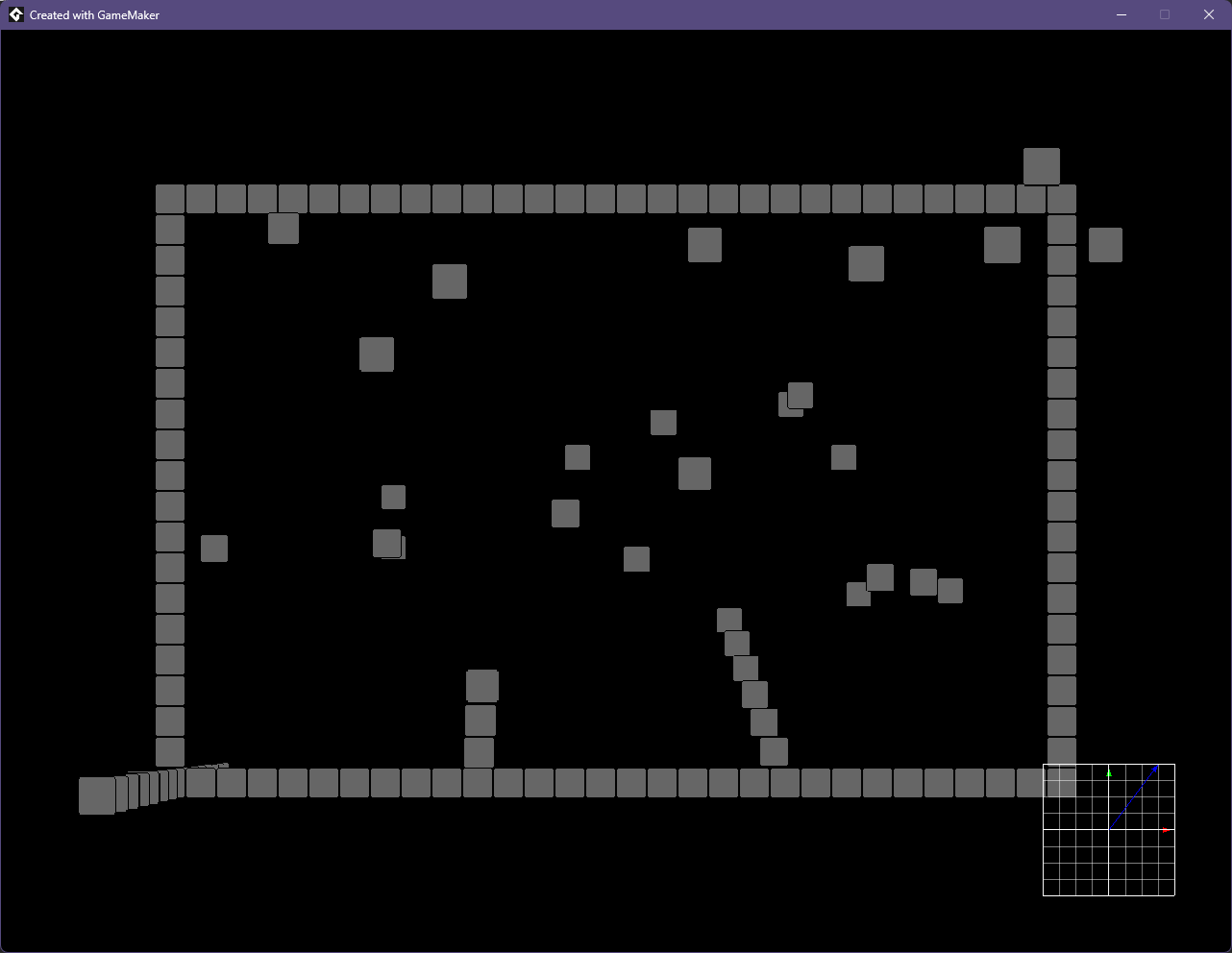
카페 글에서 컴퓨터게임설계 팀프로젝트의 일환으로 개발한 게임이라고 썼는데, 게임의 소재 역시 같은 강의의 2주차 수업 자료에서 착안했습니다. 당시에 (미래의) 팀원들에게 보여주려고 급하게 만들었던 프로토타입이 아직 컴퓨터에 남아 있습니다.
사실은 이번에도 위에서 언급한 저 한 소재에 대해서 엄청나게 긴 해설을 쓰려고 합니다.
선형대수학을 또 하게 된 사연
Honeyhouse 회고도 무턱대고 선형대수학 얘기부터 시작했는데 이번에도 무턱대고 선형대수학 얘기부터 시작하게 되네요.
3개의 축(위의 스크린샷에서는 우하단의 빨간색, 초록색, 파란색 화살표)으로 시점을 결정하는 현재의 시스템 역시 이때부터 기획해 두었습니다. 게임 내에서 따로 설명하지는 않았지만, 이 세 축은 아래와 같습니다.
- 카메라의
x편차와y편차- 이 값이 0이 아닐 경우 카메라가 맵을 수직으로 보는 것이 아니라 편차값만큼 치우친 곳에서 비스듬하게 맵을 봅니다.
- 렌더링은 3D이지만 게임플레이는 사실상 2D이기 때문에 (GameMaker의 기본 2D 좌표계를 따라)
x/z대신x/y를 사용했습니다. - 블록의 정면 방향과 맵이 사영되는 위치를 유지하면서 카메라의 좌표를 바꾸기 위해 보통 3D 렌더링에서 쓸 일이 거의 없는 전단변환을 사용했습니다. 게임 제목인 Project::shear 역시 여기서 유래했습니다.
- 카메라의 원근감
persp
한편, 3D를 지원하는 그래픽스 파이프라인이나 게임 엔진에서는 보통 아래와 같이 두 종류의 사영 행렬을 제공합니다.
- 정사영행렬(orthographic projection matrix): 원근을 고려하지 않고 멀리 있는 것과 가까이 있는 것을 같은 크기로 투영합니다.
- 고등학교 교육과정에서 배우는 정사영을 번역어로 사용했습니다.
- 투시사영행렬(perspective projection matrix): 가까이 있는 것은 상대적으로 크게, 멀리 있는 것은 상대적으로 작게 투영합니다.
- one/two/three-point perspective가 주로 '1/2/3점 투시'로 번역되는 것을 참고해 번역어를 정했습니다.
GameMaker에서는 아래와 같이 사영 행렬을 반환하는 3종류의 함수를 제공하고 있습니다.
matrix_build_projection_ortho(width, height, znear, zfar): 정사영행렬에 해당합니다. 카메라를 기준으로 가로width, 세로height의 직사각기둥에서 카메라로부터의 거리가znear부터zfar까지인 직육면체를 잘라 사영합니다.matrix_build_projection_perspective(width, height, znear, zfar): 투시사영행렬에 해당합니다. 카메라의 시야를 이루는 (znear기준) 가로width, 세로height인 직사각뿔에서 카메라로부터의 거리가znear부터zfar까지인 절두체2를 잘라 사영합니다.matrix_build_projection_perspective_fov(fov_y, aspect, znear, zfar):matrix_build_projection_perspective와 같지만fov_y(세로 방향의 시야각)와aspect(종횡비)로부터width와height를 역산합니다.
특히 matrix_build_projection_ortho는 matrix_build_projection_perspective에서 persp을 0으로 보낸 특수한 경우로 볼 수 있습니다.
위에서 제공하는 함수를 사용해 맵을 렌더링하려면 0으로 나누기를 방지하기 위해 persp의 값을 확인해 분기해야 합니다.
// 설명의 편의를 위해...
// * `x`, `y`, `persp`이 지역 변수로 정의되어 있다고 가정합니다.
// * 맵의 중심이 (0, 0, 0)이고 가로가 `room_width`, 세로가 `room_height`인 것으로 가정합니다.
// 실제 게임에서와 같이 오른손 좌표계를 사용합니다.
// 부동소숫점 오차를 방지하기 위해 매우 작은 값 미만인지 테스트하는 방식을 사용했습니다.
if(persp < 0.000001) { // 정사영
// 뷰 행렬
matrix_set(
matrix_view,
// 카메라의 배치에서 뷰 행렬을 역산하는 함수
matrix_build_lookat(
x, y, -9, // 카메라의 좌표
0, 0, 0, // 카메라가 바라보는 좌표
0, -1, 0 // 위 방향을 나타내는 벡터
)
);
// 사영 행렬
matrix_set(
matrix_projection,
matrix_build_projection_ortho(
room_width, room_height,
9 - 8, 9 + 8 // 피사체 앞뒤 8단위만큼을 사영
)
);
} else { // 투시사영
matrix_set(
matrix_view,
matrix_build_lookat(
x, y, -1/persp, // 0으로 나누기!!!!!
0, 0, 0 ,
0, -1, 0
)
);
matrix_set(
matrix_projection,
matrix_build_projection_perspective(
room_width, room_height,
1/persp - 8, 1/persp + 8
)
)
}
이 정도의 코드로 만족할 수 있었겠지만, 겉보기에는 아무런 불연속점 없이 자연스럽게 이어지는 시점 변환을 나타내는 데 0으로 나누기가 생기고 그걸 우회하기 위해 분기를 사용해야 한다는 것이 내심 마음에 들지 않았습니다. 과거의 저를 조금 더 변호하자면, 이때의 사전 작업이 결국 나중의 개발에 도움이 되었고 그래픽스 파이프라인의 이해도를 더 높였다고 생각합니다.
- 렌더링에 사용하는 위의 행렬을 충돌 판정에도 똑같이 사용하기 때문에 분기로 때우는 위의 방식이 언제 문제로 이어질지 알 수 없었습니다.
- 나중에 실제로 충돌 판정을 구현할 때 부동소숫점 오차에 온 신경을 쏟았기 때문에 조금이라도 더 안정적인 수학적 모델을 구축하는 것이 중요했습니다.
- 심리적인 안정뿐만 아니라 실제 작업도 간단해지는 효과를 얻었습니다. 예를 들어, 조건부 충돌 판정을 작업할 때 행렬 모양에 따라 분기할 필요 없이 짧은 수식 하나로 넘길 수 있었습니다.
불행하게도 제가 원하는 것을 구현하려면 엔진에서 제공하는 안락한 matrix_build_projection_*에서 벗어나 사영 행렬을 직접 구해야 합니다.
렌더링의 원리
사영 행렬을 구하기 전에 우선 3D 월드가 렌더링되는 원리를 알아야 합니다. 이 게임에서 사용하는 OpenGL (ES) 파이프라인에서는 다음과 같은 원리로 그래픽을 렌더링합니다.
- 게임 프로그래머가 모델 공간에서 3D 모델을 설계하고 정점 버퍼의 형태로 엔진에 입력한다.
- 게임이 모델을 렌더링할 때가 되면 게임 코드는 원하는 셰이더에 정점 버퍼를 전달한다.
- 셰이더는 입력된 모델 공간의 정점 버퍼를 버텍스 셰이더에 통과시켜서 클립 공간상의 정점을 얻는다.
- 이 과정에는 위의
matrix_set에서 설정한matrix_*행렬을 적용하는 과정이 포함됩니다.
- 이 과정에는 위의
- 위에서 얻은 클립 공간의 정점 중 특정 영역 안에 들어온 것만 취한 뒤 화면상에 출력될 좌표 데이터로 변환한다.
- 클립 좌표 중 \(x\)와 \(y\)는 그대로 화면상의 좌표로 사용하고, \(z\)는 Z 버퍼링에 사용합니다. 일반적인 3D 렌더링에서는 Z 버퍼를 사용해 어떤 물체가 카메라에 더 가까운지, 즉 새로운 픽셀을 기존 픽셀 위에 그려야 하는지 아니면 버려야 하는지 판정합니다.
- 위에서 얻은 픽셀 데이터를 프래그먼트 셰이더에 통과시켜서 픽셀의 색상을 얻는다.
- 위에서 얻은 색상을 화면에 그린다.
즉, 엔진에서 제공하는 matrix_build_projection_* 함수를 포함해 matrix_set에 전달되는 행렬의 역할은 버텍스 셰이더에 전달되어 월드 공간의 좌표를 클립 공간의 좌표로 변환하는 것입니다. 이 중...
- 월드 행렬은 모델 공간을 월드 공간으로 변환하는 단계, 즉 모델로 표현된 소품을 월드에 배치하는 단계에 해당합니다.
- 이 글의 초점은 월드 공간을 클립 공간으로 변환하는 것이므로 모델 공간과 월드 행렬은 따로 다루지 않겠습니다.
- 뷰 행렬은 월드 공간을 뷰 공간['카메라'가 원점에 있고 (GameMaker 기준) 양의 \(z\)축 방향을 바라보는 좌표계]으로 변환하는 단계, 즉 임의로 정해져 있는 월드 좌표계를 '카메라'의 관점으로 변환하는 단계에 해당합니다.
- 사영 행렬은 뷰 공간을 클립 공간으로 변환하는 단계, 즉 카메라가 비추는 실제 장면을 '필름'에 사영하는 단계에 해당합니다.
그런데 사실 '카메라'는 렌더링 파이프라인의 이해를 돕기 위한 비유일 뿐 실제로 월드 내에 물리적인 카메라를 만들어서 렌더링을 하는 것은 아니기 때문에 실질적으로 제가 손댈 수 있는 것은 뷰 행렬과 사영 행렬 두 가지입니다. 어차피 월드-뷰-사영 행렬을 모두 곱해서 결과가 같으면 렌더링한 결과는 같으니까요.
GameMaker와 OpenGL의 좌표계
3D 렌더링의 원리를 이해했으니 이제 변환의 대상과 결과물인 월드 공간과 클립 공간을 알아야 합니다. 우선 위에서 잠깐 다뤘듯이 GameMaker에서 사용하는 2D 좌표계는 다음과 같습니다.
- 룸의 왼쪽 위가 원점
- \(x\)축은 오른쪽
- \(y\)축은 아래쪽
- 내장 인스턴스 변수
depth를 사용해 인스턴스가 그려지는 순서를 조절할 수 있으며, 클수록 '깊은' 곳에 그려지고depth가 작은 인스턴스에 묻힙니다. 이 변수가 실질적인 '제3의 축' 역할을 합니다.
Project::shear에서도 이 설정을 존중해 다음과 같이 월드 좌표계를 구성했습니다.
- 맵의 왼쪽 위가 원점
- \(x\)축은 오른쪽
- \(y\)축은 아래쪽
- \(z\)축은 카메라에서 먼 쪽
- 피사체는 \(z\) = 0에 위치
마지막으로, 클립 공간에서 렌더링에 사용하는 범위는 \(-1 \le x \le 1\), \(-1 \le y \le 1\), \(0 \le z \le 1\)이며, 카메라에 가까울수록 \(z\)가 작습니다.3 이제 알아야 하는 좌표계는 모두 구했습니다.
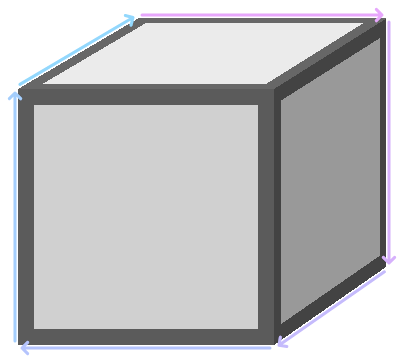
3차원 세계, 4차원 행렬
하지만 본격적으로 사영 행렬을 구하기 전에 알아야 할 것이 또 하나 남았습니다(진짜 마지막입니다. 약속드립니다). 3차원 월드의 렌더링을 다루는 데는 3차원 행렬이 아니라 4차원 행렬이 필요합니다.
아주 기본적인 3차원 좌표계의 변환은 3차원 벡터와 3차원(3×3) 행렬만 있으면 되는 게 맞습니다. 다만 3차원 행렬은 원점에 변환을 가할 수 없다는 치명적인 한계가 있습니다. 아래 행렬의 \(a\)부터 \(i\)까지에 무엇을 대입하든 원점의 변환 결과는 그대로 원점입니다.
\[\begin{pmatrix} a & b & c \\ d & e & f \\ g & h & i \end{pmatrix} \begin{pmatrix} 0 \\ 0 \\ 0 \end{pmatrix} = \begin{pmatrix} 0a + 0b + 0c \\ 0d + 0e + 0f \\ 0g + 0h + 0i \end{pmatrix} = \begin{pmatrix} 0 \\ 0 \\ 0 \end{pmatrix}\]원점에 변환을 가하려면 행렬로써 \(f(x, y, z) = ax + by + cz + \boldsymbol{d}\)를 표현할 수 있어야 하는데, 그 대신 \(f'(x, y, z, \boldsymbol{w}) = ax + by + cz + \boldsymbol{dw}\)를 표현하는 4차원(4×4) 행렬을 만들고 \(w\)를 항상 1인 것으로 취급하는(!) 수학적 '꼼수'를 사용하면 됩니다.
\[\begin{pmatrix} a & b & c & j \\ d & e & f & k \\ g & h & i & l \\ 0 & 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} 0 \\ 0 \\ 0 \\ 1 \end{pmatrix} = \begin{pmatrix} 0a + 0b + 0c + 1j \\ 0d + 0e + 0f + 1k \\ 0g + 0h + 0i + 1l \\ 0 \cdot 0 + 0 \cdot 0 + 0 \cdot 0 + 1 \cdot 1 \end{pmatrix} = \begin{pmatrix} j \\ k \\ l \\ 1 \end{pmatrix}\]그래도 아직 한 가지 문제가 더 남아 있습니다. 절두체를 직육면체로 변환하려면 나눗셈이 필요한데(절두체의 단면 중 너비가 \(a\)인 것을 너비가 1인 단면으로 바꾸려면 좌표에 \(\frac{1}{a}\)을 곱해야 합니다), 행렬로는 나눗셈을 표현할 수 없습니다.
선형대수학으로 3D 렌더링까지 할 수 있으려면 한 가지 꼼수가 더 필요합니다. 아까 벡터에 억지로 집어넣은 \(w\) = 1이 보이시나요? \(w\)가 1이 아니면 어떻게 될까요? 그냥 나눠서 1로 만들면 되는 거 아님??
변환한 벡터의 \(w\)좌표가 절두체 단면의 너비(의 상수배)가 되도록 사영 행렬을 구성하면 OpenGL이 투시 나눗셈(perspective division)이라는 과정을 거쳐 절두체를 깔끔한 직육면체로 만들어 줍니다. 다행히 절두체 단면의 너비는 선형적으로 증가하므로 행렬로 표현할 수 있습니다. 특히 절두체의 모서리를 연장하면 카메라가 있는 평면에서 단면의 너비가 0이 되므로 카메라의 좌표를 버텍스 셰이더에 넣으면 변환된 \(w\)좌표는 0이 됩니다. (나중에 이 성질을 활용할 예정입니다.)
참고로 여기서 '꼼수'라고 표현한 테크닉을 수학계에서는 동차좌표라고 합니다.
사영행렬 구성하기
위에서 언급한 3개의 시점 축 \(\Delta x\), \(\Delta y\), \(p\)(ersp)와 맵의 크기 \(w\)(idth), \(h\)(eight), 절두체 단면의 거리 \(n\)(ear), \(f\)(ar)까지 총 7개의 변수를 가지고 월드 좌표계를 클립 좌표계로 변환하는 행렬을 구성해 봅시다. 단...
- \(\Delta x\)와 \(\Delta y\)는 플레이어 방향으로 돌출된(즉, 음의 \(z\)좌표를 가지는) 물체가 오른쪽 아래로 튀어나와 보이는 방향이 양인 것으로 정의합니다.
- \(n\)과 \(f\)는 카메라에서 단면까지의 거리가 아니라 피사체에서 단면까지의 부호 있는 거리이며, 카메라에서 먼 쪽이 양입니다.
- 기존의 '카메라 지향' 사영 행렬을 사용하면 카메라의 좌표에서 0으로 나누기가 발생하기 때문에 시점이 바뀌어도 같은 곳에 있는 '피사체 지향' 방법을 사용합니다.
한 번에 행렬을 구성하기는 부담스러우니 작은 단계로 쪼개봅시다.
- 맵은 \(0 \le x \le w\), \(0 \le y \le h\)의 공간을 차지하므로 원점을 옮겨 중심을 맞춘다.
- \(\Delta x\)와 \(\Delta y\)를 사용해 전단변환을 수행한다.
- 변환된 월드를 클립 공간에 사영한다.
(참고로 행렬 변환은 오른쪽에서 왼쪽으로 이루어집니다.)
원점을 옮기는 행렬 \(\boldsymbol{O}\)(rigin)와 전단변환을 수행하는 행렬 \(\boldsymbol{S}\)(hear)는 쉽게 구성할 수 있습니다.
\[\boldsymbol{O} = \begin{pmatrix} 1 & 0 & 0 & -\frac{w}{2} \\ 0 & 1 & 0 & -\frac{h}{2} \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix}\] \[\boldsymbol{S} = \begin{pmatrix} 1 & 0 & -\Delta x & 0 \\ 0 & 1 & -\Delta y & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix}\]\(\Delta x\)와 \(\Delta y\)에 음의 부호가 있음에 유의해 주세요.
\(\boldsymbol{P}\)(rojection) 역시 더 작은 단계로 쪼개봅시다.
- 월드 좌표계를 뷰 좌표계로 변환한다. 단, 카메라가 아닌 피사체가 원점에 온다.
- 변환된 뷰를 클립 공간에 사영한다.
사실 위에서 맵의 중심을 이미 맞췄고 피사체는 z = 0에 있는 것으로 정의했기 때문에 \(\boldsymbol{V}\)(iew)는 그냥 단위행렬이 됩니다.
\(\boldsymbol{C}\)(lip)가 제일 구성하기 어려운 행렬입니다.
\[\boldsymbol{C} = \begin{pmatrix} C_{11} & C_{12} & C_{13} & C_{14} \\ C_{21} & C_{22} & C_{23} & C_{24} \\ C_{31} & C_{32} & C_{33} & C_{34} \\ C_{41} & C_{42} & C_{43} & C_{44} \end{pmatrix}\]그런데 생각해보면 뷰 좌표를 클립 좌표로 변환할 때는 \(x\), \(y\), \(z\) 사이에 뚜렷한 상호작용이 없는 것을 알 수 있습니다. \(z\)가 변함에 따라 클립 좌표의 \(x\)와 \(y\)가 바뀌긴 하지만 그건 투시 나눗셈으로 처리해야 하니 \(z\)가 아니라 \(w\)에 의존하는 것으로 생각할 수 있습니다.
- \(x\)와 \(y\)좌표는 각각 독립적으로 클립 좌표계에 맞추어집니다.
- \(z\)좌표는 투시 나눗셈에 간접적으로 활용되면서 동시에 near/far 평면을 \(\frac{z}{w}\) = 0과 \(\frac{z}{w}\) = 1에 맞추는 역할을 합니다.
이 사실을 바탕으로 \(\boldsymbol{C}\)에서 \(x\)와 \(y\)와 \(z\)/\(w\)가 상호작용하는 항을 없애면 이렇게 됩니다. 미지수가 16개에서 6개로 줄었네요!
\[\boldsymbol{C} = \begin{pmatrix} C_{11} & 0 & 0 & 0 \\ 0 & C_{22} & 0 & 0 \\ 0 & 0 & C_{33} & C_{34} \\ 0 & 0 & C_{43} & C_{44} \end{pmatrix}\]우선 \(\boldsymbol{C}\)의 우하단을 구해 봅시다. 구하고자 하는 행렬로 (?, ?, \(z\))를 변환하면 다음 성질이 성립해야 합니다.
- near 평면의 변환: 변환 전에 \(z\) = \(n\)이면 변환된 \(\frac{z}{w}\) = 0, 즉 \(z\) = 0
- far 평면의 변환: 변환 전에 \(z\) = \(f\)이면 변환된 \(\frac{z}{w}\) = 1, 즉 \(z\) = \(w\)
- 카메라의 좌표 성질: 변환 전에 \(z\) = \(-\frac{1}{p}\)이면 변환된 \(w\) = 0
위의 세 성질을 행렬 변환으로 나타내면 다음과 같습니다. 편의상 우하단 2×2 부분만 작성합니다.
\[\begin{pmatrix} C_{33} & C_{34} \\ C_{43} & C_{44} \end{pmatrix} \begin{pmatrix} n \\ 1 \end{pmatrix} = \begin{pmatrix} C_{33}n + C_{34} \\ C_{43}n + C_{44} \end{pmatrix} \\ \therefore C_{33}n + C_{34} = 0\] \[\begin{pmatrix} C_{33} & C_{34} \\ C_{43} & C_{44} \end{pmatrix} \begin{pmatrix} f \\ 1 \end{pmatrix} = \begin{pmatrix} C_{33}f + C_{34} \\ C_{43}f + C_{44} \end{pmatrix} \\ \therefore C_{33}f + C_{34} = C_{43}f + C_{44}\] \[\begin{pmatrix} C_{33} & C_{34} \\ C_{43} & C_{44} \end{pmatrix} \begin{pmatrix} -\frac{1}{p} \\ 1 \end{pmatrix} = \begin{pmatrix} -\frac{C_{33}}{p} + C_{34} \\ -\frac{C_{43}}{p} + C_{44} \end{pmatrix} \\ \therefore C_{44}p - C_{43} = 0\]연립방정식을 푼 결과는 다음과 같습니다.
\[C_{33} = \frac{1 + pf}{f - n}C_{44} \\ C_{34} = -n\frac{1 + pf}{f - n}C_{44} \\ C_{43} = pC_{44}\]등식이 3개였으므로 미지수 중 하나는 결정할 수 없지만, 어차피 투시 나눗셈을 하면 상쇄되므로 편의상 \(C_{44}\) = 1로 정하겠습니다.
\[\boldsymbol{C} = \begin{pmatrix} C_{11} & 0 & 0 & 0 \\ 0 & C_{22} & 0 & 0 \\ 0 & 0 & a & -na \\ 0 & 0 & p & 1 \end{pmatrix} \; \mathrm{where} \; a = \frac{1 + pf}{f - n}\]이제 마지막으로 \(z\) = 0인 경우의 좌표 하나를 대입하면 \(\boldsymbol{C}\)를 완전히 결정할 수 있습니다.
\[\begin{pmatrix} C_{11} & 0 & 0 & 0 \\ 0 & C_{22} & 0 & 0 \\ 0 & 0 & a & -na \\ 0 & 0 & p & 1 \end{pmatrix} \begin{pmatrix} \frac{w}{2} \\ \frac{h}{2} \\ 0 \\ 1 \end{pmatrix} = \begin{pmatrix} \frac{w}{2}C_{11} \\ \frac{h}{2}C_{22} \\ -na \\ 1 \end{pmatrix} \sim (1, 1, ?) \\ \therefore C_{11} = \frac{2}{w}, C_{22} = \frac{2}{h}\]완성된 \(\boldsymbol{C}\)는 다음과 같고...
\[\boldsymbol{C} = \begin{pmatrix} \frac{2}{w} & 0 & 0 & 0 \\ 0 & \frac{2}{h} & 0 & 0 \\ 0 & 0 & a & -na \\ 0 & 0 & p & 1 \end{pmatrix}\]완성된 \(\boldsymbol{M}\)은 다음과 같습니다. 🎉
\[\boldsymbol{M} = \boldsymbol{C}\boldsymbol{S}\boldsymbol{O} = \begin{pmatrix} \frac{2}{w} & 0 & 0 & 0 \\ 0 & \frac{2}{h} & 0 & 0 \\ 0 & 0 & a & -na \\ 0 & 0 & p & 1 \end{pmatrix} \begin{pmatrix} 1 & 0 & -\Delta x & 0 \\ 0 & 1 & -\Delta y & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 & -\frac{w}{2} \\ 0 & 1 & 0 & -\frac{h}{2} \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix}\]저는 여기서 \(\boldsymbol{S}\boldsymbol{O}\)에 해당하는 아래 행렬을 뷰 행렬로 사용했고...
\[\begin{pmatrix} 1 & 0 & -\Delta x & -\frac{w}{2} \\ 0 & 1 & -\Delta y & -\frac{h}{2} \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix}\]나머지 \(\boldsymbol{C}\)를 그대로 사영 행렬로 사용했습니다.
충돌 판정
위키백과에서는 충돌 처리의 두 가지 방법론으로 사후 (이산) 처리와 사전 (연속) 처리를 들고 있습니다.
- 사후(a posteriori) 처리는 일단 물체를 움직인 후 겹치는 물체가 생기면 충돌한 것으로 간주해 적절한 처리를 하는 방식입니다. 절대 다수의 게임에서 이 방식을 사용하고 있습니다.
- 사전(a priori) 처리는 모든 물체의 궤적을 사전에 계산한 뒤 두 물체의 궤적 사이에 교점이 생기는 정확한 시점을 예측해 적절한 처리를 하는 방식입니다. 현실에서 물체가 충돌하는 방식과 더 비슷합니다.
프로젝트를 막 시작했을 때는 모든 충돌 판정을 사전 처리로 구현하려고 했는데, 학기말이 생각보다 빨리 다가오고 있어서 시점 변환만 사후 처리로 구현했습니다. (원래는 시점 변환 처리에 사차방정식이 필요했다고 서술했는데, 다시 계산해보니 이차방정식으로 충분해 보여서 삭제했습니다. 이차방정식도 기간 안에 구현하기는 무리였을 거라고 생각합니다.)
변환을 거친 맵 요소의 표현
플레이어와 맵 요소 사이의 충돌을 판정하려면 먼저 변환을 거친 맵 요소를 충돌 판정을 할 수 있는 형식으로 표현해야 합니다. 여러 가지 방법을 구상하다가 직육면체를 사영하면 외곽선을 4~6개의 선분으로 표현할 수 있는 것을 기억해내고 방향이 있는 선분을 시계 방향으로 배치해서 충돌 범위를 표현했습니다.
충돌 판정을 편하게 하기 위해 민코프스키 차를 구하고 4~6개의 선분을 기준으로 얼마나 깊이 묻혀있는지 계산해서 모두 양수이면 충돌한 것으로, 하나라도 음수이면 충돌하지 않은 것으로 판단합니다. 이 방법에는 어느 방향으로 얼마나 움직이면 충돌이 해결되는지도 바로 알 수 있다는 장점이 있습니다.
단방향 경계면의 충돌 판정
Project::shear에서는 앞면이 보일 때만 충돌 판정에 참여하는 맵 요소를 찾아볼 수 있습니다. 인게임에서 충분히 드러나지 못한 것 같아 아쉬웠던 점 중 하나입니다.
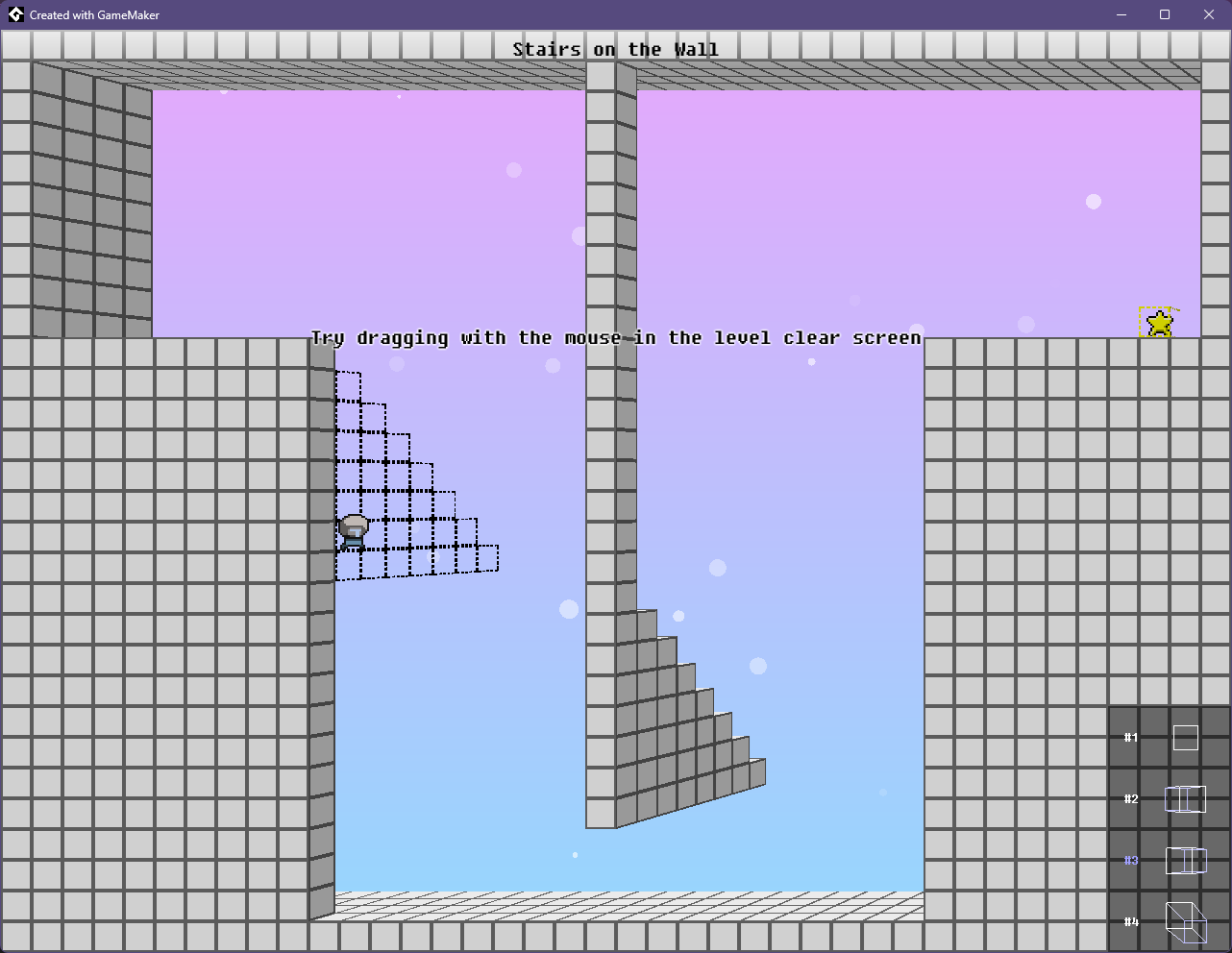
이 판정 역시 아까 구한 사영 행렬에서 유도했는데, 예를 들어 위 스크린샷에 있는 왼쪽 경계면은 \(z\)가 커질수록 사영되는 점이 왼쪽으로 갈 때만(즉, 앞면이 보일 때만) 충돌 판정을 활성화하는 방식으로 구현했습니다. 참고로 \((x, y, z)\)의 변환을 닫힌 형태로 구하면 이렇습니다.
\[\begin{align} \boldsymbol{C}\boldsymbol{S}\boldsymbol{O} \begin{pmatrix} x \\ y \\ z \\ 1 \end{pmatrix} &= \begin{pmatrix} \frac{2}{w} & 0 & -2\frac{\Delta x}{w} & -1 \\ 0 & \frac{2}{h} & -2\frac{\Delta y}{h} & -1 \\ 0 & 0 & \frac{1 + pf}{f - n} & -n\frac{1 + pf}{f - n} \\ 0 & 0 & p & 1 \end{pmatrix} \begin{pmatrix} x \\ y \\ z \\ 1 \end{pmatrix} \\ &= \begin{pmatrix} 2\frac{x - z\Delta x}{w} - 1 \\ 2\frac{y - z\Delta y}{h} - 1 \\ (z - n)\frac{1 + pf}{f - n} \\ zp + 1 \end{pmatrix} \\ &\sim (\frac{2x - 2z \Delta x - w}{w(zp + 1)}, \frac{2y - 2z \Delta y - h}{h(zp + 1)}, \frac{(z - n)(1 + pf)}{(zp + 1)(f - n)}) \end{align}\]여기서 \(x\)좌표를 \(z\)에 대해 미분하고 정리하면 \(2xp > wp - 2 \Delta x\)까지 간단해집니다. 오른쪽, 위쪽, 아래쪽 경계면도 \(x\), \(\Delta x\), \(w\)를 \(y\), \(\Delta y\), \(h\)로 바꾸거나 부등호의 방향만 바꿔서 구현했습니다.
수치 안정성
플랫포밍을 처음 구현했을 때는 특정한 조작을 하면 블록 사이로 빠지는 버그가 있었습니다. (참고로 일부 블록이 깜박이는 것은 충돌 판정 디버깅입니다.)
'특정한 조작'을 디버깅할 때마다 다시 입력하는 것이 귀찮아서 자세히 파보지는 않았지만, 부동소숫점 특유의 수치 안정성 문제라고 생각하고 충돌 판정 시 \(\frac{1}{256}\)블록만큼의 완충 지대를 두어 해결했습니다. 이외에도 이동 처리 중에 무한루프에 빠지는 등의 문제가 있었는데, 열심히 디버그를 해서 어느 시점 이후에는 더 이상 문제가 발생하지 않았습니다.
스테이지 8을 보셨나요?
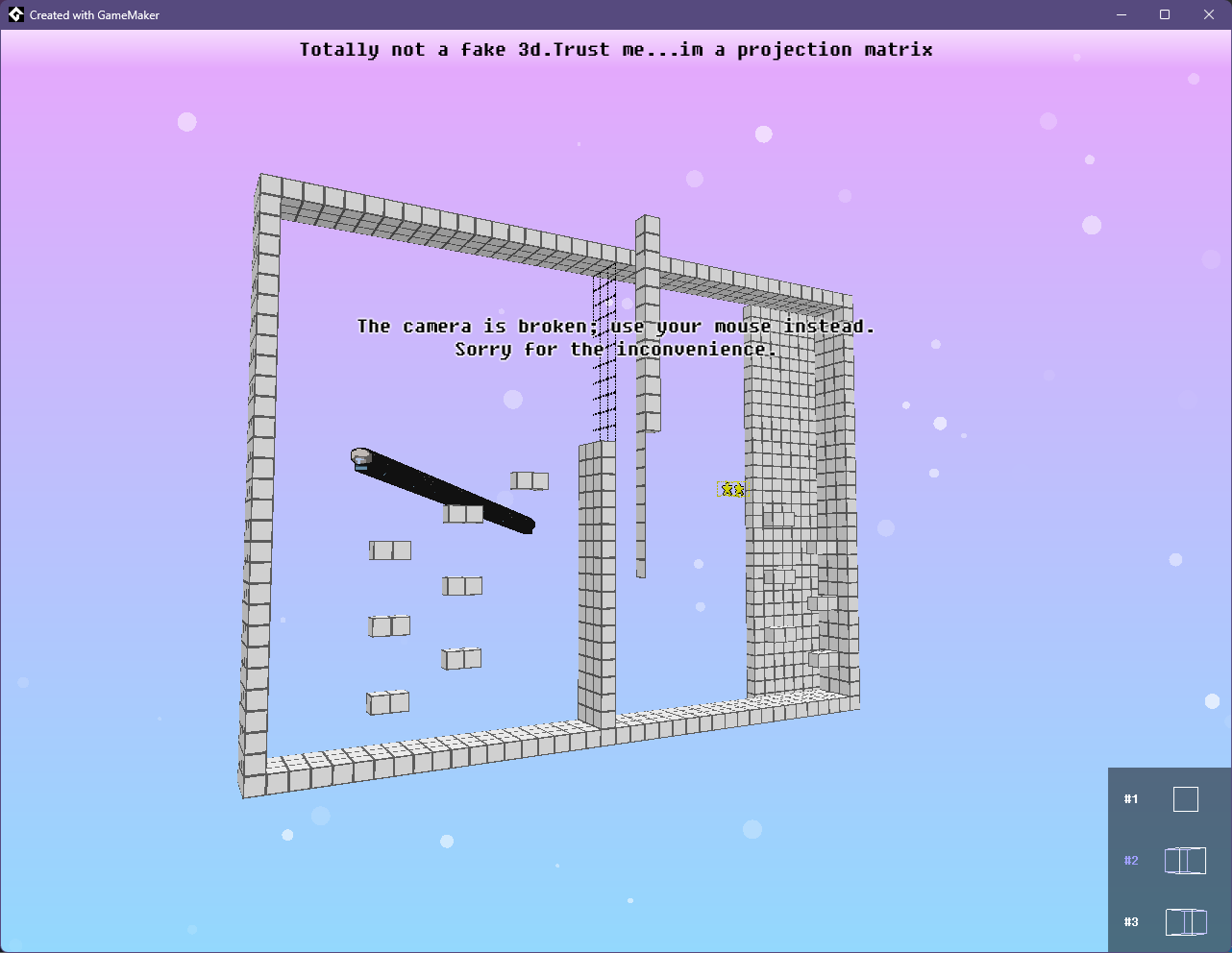
서프라이즈!!!!! 당연히 충돌 판정이 이런 식으로 구현된 건 아니고, 게임의 충돌 판정에 그럴듯한 '세계관 내' 설명을 붙이고 동시에 페이크 3D 게임이 아니라는 것을 어필하려는 결과였습니다. (3D 게임에 가산점이 부여된다는 공지가 있었습니다.)
이 게임의 모든 모델은 별도의 외부 파일 없이 게임 내에서 절차적으로 구성했는데, 플레이어 모델은 persp에 따라 비선형으로 바뀌기 때문에 매번 정점 버퍼를 다시 만들어줘야 했습니다. 지금 생각해보면 행렬을 어떻게 잘 만들어서 모델 하나를 돌려쓸 수 있었을 것 같은데 실제로 가능할지는 잘 모르겠네요.
참고로 8스테이지에 나온 플레이어 모델은 사실 1스테이지부터 계속 쓰고 있었습니다.
결론
드디어 기억나는 내용을 전부 썼네요!
허니하우스에서 배웠던 기획은 작게 잡으라는 교훈을 잊어버리고 또 커다란 기획을 세웠다가 제가 다 구현해야 한다는 현실의 벽에 부딪혔습니다. 그나마 4명이 조를 짜서 작업해서 그런지 조금 서두르긴 했지만 마감을 못 맞추는 사태는 피했습니다. 아마 이 글의 링크를 작업용 디스코드 서버에도 올릴 텐데 이 자리를 빌려 감사의 말씀을 전하고 싶습니다.
이번 글은 이 정도로 마칠까 합니다. 재밌게 읽으셨길 바라요 🙇♂️
